
传统人工巡检普遍存在工作效率低、劳动强度大、人员不足、环境恶劣等问题,在巡检效率和企业效益提升方面存在诸多问题。
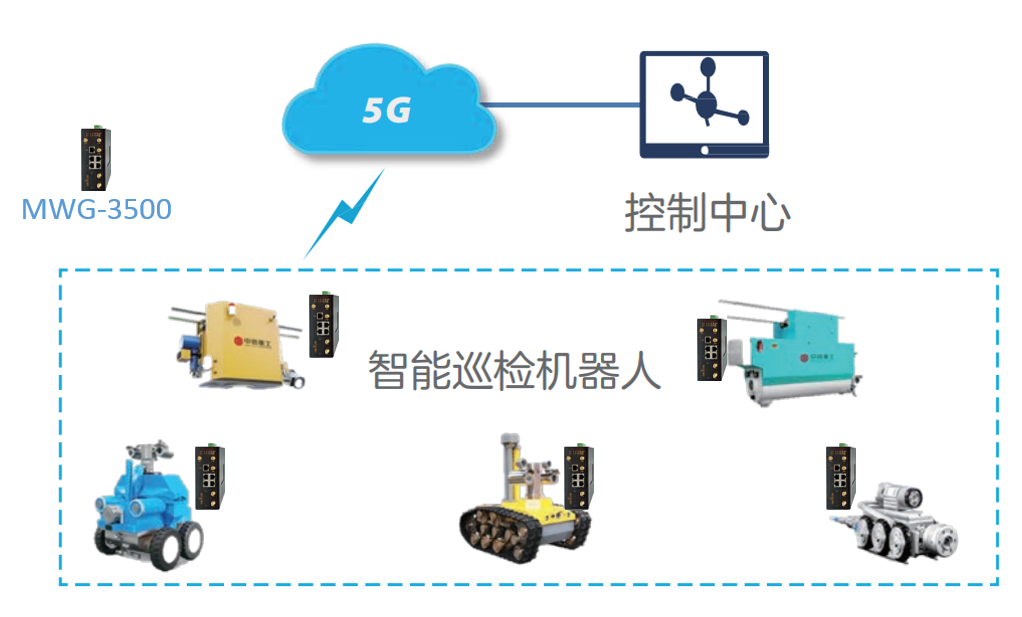
随着人工智能技术、自动识别技术和机器人产业的快速发展,智能巡检机器人不仅可以减少人力消耗和技术难题,还能准确提供检测精度,逐渐发展成为“与人工巡检并驾齐驱”的巡检“ 新模型。
今天,就让我们聚焦“巡逻机器人”这个细分领域,从架构的角度分析一下它的现状和未来的发展方向。
巡检机器人现状
巡检机器人属于复合型机器人,即集移动机器人和通用工业机器人功能于一体的机器人。
上图中的联想晨星机器人X1就是一个例子。 它由一个轮式机器人串联一个手臂机器人和一个感知系统组成。 联想晨星机器人Q1由腿式机器人、串臂机器人和感知系统组成。 相对于AGV/AMR和机械臂的单一功能,结合了两者的特点,更加灵活。
巡检机器人市场前景广阔,潜力巨大,尤其是在人工成本逐渐上升的情况下。 在危险、恶劣的作业环境下,许多企业迫切需要用机器人来代替人工巡检作业。
虽然处于蓝海阶段,但不能否认巡逻机器人市场还不成熟,没有形成市场规模,需求多样,导致非标项目多,量产产品少。
那么问题是什么?
① 没有统一的行业标准,巡检机器人厂商做的五花八门,各家都在建立自己的生态链。 相互壁垒很深,导致机器人与调度系统、巡更管理系统深度绑定,难以相互交叉混用;
② 没有真正抓住客户的痛点,考察目前运营机器人的市场,部分厂家距离客户较远,无法真正触及客户的痛点,造成大量的人力物力,创造出来的产品不能真正解决用户的问题;
③整合困难。 需求多种多样,检测应用也多种多样。 这些需求很难用一个产品来覆盖,导致很多非标准的需求,增加了集成的难度;
④缺乏标准化产品,由于前面原因的存在,巡检机器人很难标准化成量产产品;
⑤技术有待提高,智能化不足。 巡检机器人在巡检监控、自主管理、调度管理等方面实现全智能化还有很长的路要走;
⑥通过性和稳定性有待提高。 目前腿式机器人和轮式机器人的通过能力都有限,很多场景无法正常工作; 并且因为大部分巡逻机器人都没有,长期没有经过系统的测试和优化,最终导致产品稳定性不够;
⑦成本居高不下。 巡检机器人包含多个控制器主机,资源浪费严重,材料成本高,研发成本高。
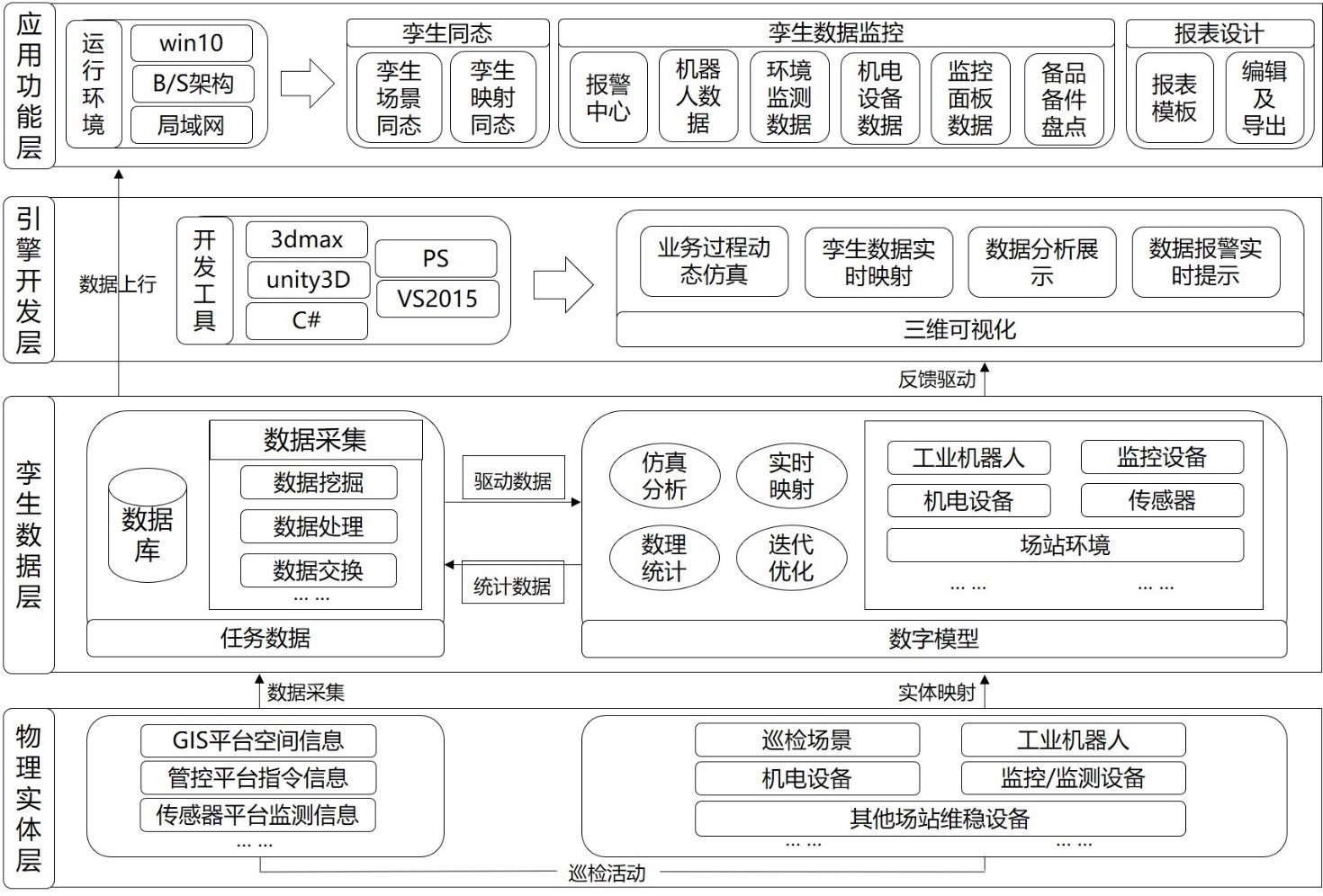
这些问题大多直接或间接地与软件系统相互影响,因此软件架构的优化将非常有利于解决上述一些长期存在的问题。
目前巡检机器人的结构大致如下:
运动控制主机:腿式、轮式机器人或手臂机器人的运动控制系统;
智能识别系统:在巡检作业中,负责监测被检物体的状态;
智能感知主机:巡检机器人的中央逻辑处理模块;
机器人调度系统:负责对所管辖的机器人组进行调度;
巡检管理系统:负责定义巡检规则和巡检对象。
接下来我们对关键模块一一进行分析。
1个
运动执行模块
虽然实现方式完全不同,但无论是轮式机器人还是腿式机器人,都可以抽象为几个部分:控制器系统+驱动+电机。 因此,无论是腿式机器人还是轮式机器人,都可以抽象出相同的接口供智能感知系统调用。 因此,运动控制模块和智能感知系统可以相互独立,不耦合,符合模块化设计思想。
如下图,足式机器人或轮式机器人的ROS Node向下调用SDK,向上暴露标准的geometry_msgs::msg::Twist消息供其他ROS程序调用。 由于该模块目前的设计比较科学,以后还会继续沿用,这里不再赘述。
2个
感知系统
感知系统是巡检机器人的大脑,接收来自外部各种传感器设备的输入,然后进行各种逻辑和算法处理,输出相应的决策给执行机构,这与我们大脑的工作方式非常相似。
感知系统的设计,现在主流是使用ROS系统。 ROS系统本身就是一个非常优秀的机器人操作系统,其自身的模块化和扩展性,以及外围接口的抽象性都非常好。 因此,借助ROS系统的优势,我们可以专注于感知系统的内部逻辑和算法设计,而不必投入过多的精力去应对设备间数据交互的外设或通信协议的变化。 从而大大提高了开发效率和功能模块的复用性。
感知系统的架构如下图所示:
尽管 ROS 是完美的,但它也有一些缺点。 比如从ROS1过渡到ROS2后,原来ROS1开发的代码不能继续使用,存在兼容性问题。
在以后的架构设计中,需要考虑到以后ROS版本变化时,尽量避免因为兼容性问题需要重写核心软件模块的问题。 因此,我们在设计ROS代码时,可以将核心功能封装到非ROS Library的库文件中。 因此,当ROS版本变化较大时,只需要修改ROS模块,而这些Library库文件都不需要修改,提高了代码的复用性和稳定性。 其结构如下图所示:

3个
上层标准通讯协议
目前巡检机器人厂家很多,但都没有标准的通信协议。 因此,每台机器人的对外通信接口都是专有协议,这将导致不同厂商的机器人无法互换。 对于客户来说,这意味着如果购买A品牌的巡更机器人,需要整体购买该品牌的调度系统A和巡更管理系统A。
另一方面,对于巡检机器人厂商B来说,如果要销售自己生产的机器人B,就必须提供调度系统B和巡检管理系统B。由于A和B之间的产品不能混用,所以每个厂商都需要重新发明轮,这无疑增加了各品牌之间的壁垒,也阻碍了巡检机器人的量产化和标准化。
未来,如果能够制定统一的巡检机器人标准协议,吸引各类巡检机器人加入并遵守协议,那么这个问题将从根本上得到解决。
但是,在不确定未来机器人将采用什么协议作为标准的情况下,在设计巡检机器人的未来架构时,需要在外部通信接口和感知上的逻辑算法模块之间增加一层协议抽象系统,以便未来快速适配不同的协议。
4个
视觉智能检测模块
在巡检机器人架构中,视觉智能检测也是一个非常重要的模块,负责对检测到的物体进行分析判断,并将分析结果反馈给巡检机器人的主控制器。 由于视觉智能检测系统是一个相对独立的模块,通过网络与巡检机器人主控进行通信,在架构上相对独立。
未来主要从两方面优化架构。
- 视觉智能检测模块与机器人主控之间没有标准协议,因此在未来的软件架构中可以对视觉智能检测的对外接口进行抽象和隔离,不影响机器人主控系统的功能巡检机器人;
- 从成本角度考虑,未来可将视觉智能检测系统部署在机器人主控器上运行,节省工控机成本。 因此,在软件架构设计中应考虑两个系统运行环境的兼容性和CPU资源的分配。
5个
调度系统
通常在一个应用场景中,会有多个巡检机器人同时工作,所以调度系统就像军队的指挥官,充当军队的指挥官,协调各个机器人的调度指挥,完成各种任务。任务。
在整体结构中,调度系统位于巡更系统和机器人之间。 向上与巡更管理系统数据交互,向下与巡更机器人交互。 因此,调度系统的对外接口也需要有一个标准的协议。 问题。 否则,如果底层巡检机器人更换为其他品牌,或者巡检管理系统变更时,会导致无法与调度系统正常通信。
因此,在设计调度系统未来的架构时,需要对其向上和向下的接口进行抽象,有两个目标
- 调度系统支持无缝接入其他品牌机器人,即只要符合标准行业协议的机器人,都可以通过调度系统进行调度;
- 由于未来调度系统和巡更管理系统之间有一个标准的接口,未来调度系统可以无缝连接到其他品牌的巡更管理系统。
这样巡检管理系统、调度系统、机器人不再绑定,而是相互隔离,支持任意品牌产品的混装。
6个
巡更管理系统
巡检系统的主要职责是创建巡检任务、设置巡检规则、记录查看、对巡检结果进行总体处理,同时也具有巡检机器人状态显示的功能。
未来的巡检系统应该是一个集成了各种操作角色的完整系统,比如巡检员、部署员、高级管理员等角色。 以部署员或高级管理员身份登录时,用户可以直接设置调度系统或机器人。 当然,在巡检管理系统的技术路线上,还是会选择web方式。
对元宇宙、AI眼镜等技术的支持也将成为巡检管理系统的主要功能。 未来,用户可以身临其境地查看检查对象。 随着元宇宙的兴起和技术的普及,这将是未来的趋势。
总结
巡检机器人作为一种智能复合机器人,还处于高速发展阶段,技术更新迭代速度会非常快。 在设计和优化其架构时,需要综合考虑机器人的成本、稳定性、兼容性、可扩展性等因素,使其能够灵活适配和兼容未来新的技术路线。
①融合:未来巡检机器人可能会进入家庭生活场景,所以在未来的架构设计中,需要考虑与物联网产品的融合;
②安全:“安全”将成为未来巡检机器人的重要指标。 无论是在生产还是生活场景中,都必须完全保证其安全性和可靠性。 在未来的架构设计中,需要充分考虑安全因素;
③元界的一部分:随着元界的兴起,巡检机器人将与元界完美配合,在未来的架构设计中需要预留与元界通信的接口;
④综合性:腿式机器人、轮式机器人、机械臂,甚至双足机器人未来都需要不断提升性能和操作能力交叉足机器人,这样巡检机器人的综合性能才会更强;
⑤ 配置方便,即插即用:如果每台机器人都需要专业人员操作,将无法进入普通消费市场;
⑥稳定性:不言而喻,这将是未来设计中长期努力的方向;
⑦智能化:未来机器人需要具备自主管理、自主学习、与人交流、自主决策的能力,即智能、深度学习等技术将在未来机器人中占据比较重要的地位。未来建筑;
⑧接口标准化:各品牌机器人需要相互兼容交叉足机器人,相互替代。 因此,在架构设计中需要为未来的标准化接口做抽象准备;
⑨低成本是趋势:在未来的架构设计中,需要精简冗余功能,通过合理的架构节省CPU等硬件资源,可以降低部分成本。
当然,优秀的架构没有一劳永逸的,一切都需要在实际项目中不断测试、优化和改进。 但是只要方向对了,未来我们的巡检机器人会越来越成熟,到时候真正实现人机协作,用机器代替人来完成各种工作。